Impulsive systems: Principles of rapid energy release and applications to unique robot behaviors
ICRA 2022| May 23 | Philadelphia (PA), USA
Click here to Register
Overview
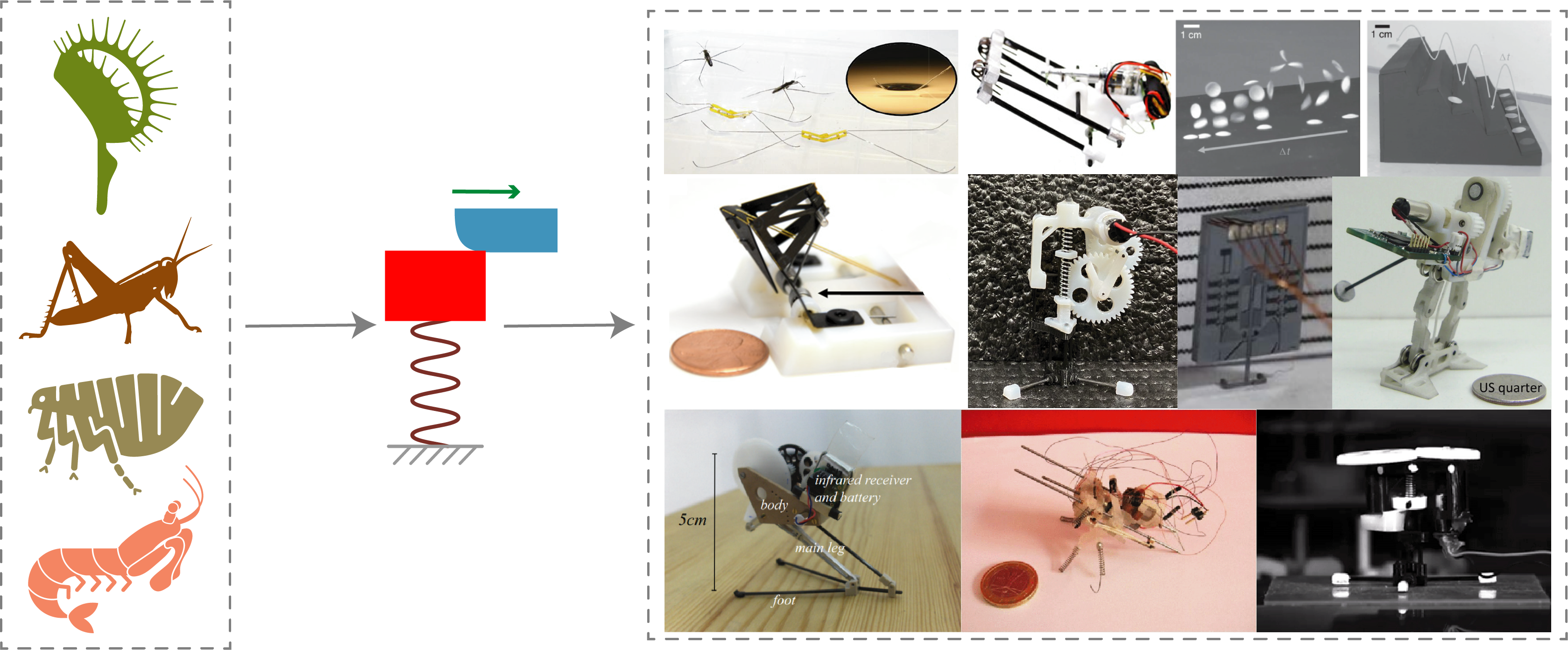
Recent research in the interdisciplinary area of impulsive systems (both natural and synthetic) has led to the establishment of the “Latch Mediated Spring Actuation (LaMSA)” framework for analyzing such ultra-fast systems in both biology and engineering. Characteristics of systems operating within this framework include the slow storage of potential energy followed by its rapid release, controlled by a latch. While seemingly straightforward, the mechanics, materials, and control considerations for such rapid energy release form the basis of LaMSA, with significant potential implications for robotics, especially for behaviors such as jumping, throwing, and striking. This workshop focuses on the integration of LaMSA principles into demonstration devices that cover these unprecedented capabilities and serve to further motivate a broader community to adopt these principles into their hardware designs. The workshop will be structured as a series of exhibitions designed to showcase our findings and further motivate the study of impulsive systems more broadly. These exhibitions comprise of four demonstration categories: (1) jumping; (2) shot-put; (3) archery; and (4) striking. For each of these demonstration categories we will have weight classes (i.e., < 10 gram, 10-50 gram, 50-100 gram, and 100-200 gram). Furthermore, system integration is encouraged by awarding bonuses to devices based on various degrees of autonomy (see scoring guidelines document for more details). Beyond the attention that this will generate, these exhibitions will also serve as a quantitative experiment that can be structured to compare, for example, energy flow control for various classes of latches, and novel control systems approaches for aperiodic, hybrid dynamic systems. Click here for Registration details.
Program
Proposed schedule
| Time | Events |
|---|---|
| 08:30am | Setup for Demonstration 1 (striking) |
| 09:00am | Introduction |
| 09:30am | Lightning talks and mini-event 1 (striking) |
| 10:30am | Coffee break and setup for demonstration 2 (jumping) |
| 11:00am | Lightning talks and mini-event 2 (jumping) |
| 12:30pm | Lunch break and setup for demonstration 3 (shot-put) |
| 01:30pm | Lightning talks and mini-event 3 (shot-put) |
| 02:30pm | Coffee break and setup for demonstration 4 (archery) |
| 03:00pm | Lightning talks and mini-event 4 (archery) |
| 04:00pm | Group discussion and LaMSA design exercise |
| 05:00pm | Wrap up and conclude |
Program specifics
Mini-event demonstrations:
During the mini-events, each participant will have an opportunity to showcase their system. The participants will have their system perform the event-specific task one at a time. Event staff will record each demonstration with both a standard HD video camera and a high speed camera. Th high speed camera will be used to better capture the high speed motions that accompany LaMSA behaviors.
Breaks:
Before each mini-event we will have a coffee/lunch break. During these breaks, participants will have an opportunity to network and discuss previous events. Meanwhile, participants for future mini-events will have the chance to set up their system. Throughout this entire time, monitors around the event will display a montage of videos of various biological and robotic LaMSA systems in operation.
Group discussion and LaMSA design exercise
One of the objectives of this workshop is to motivate and guide the exploration of latch mediated spring actuation. While the demonstrations throughout most of the day serve to motivate the investigation of LaMSA, the LaMSA Design Exercise aims to guide the exploration of LaMSA more broadly. This exercise will focus on two topics for discussion: (1) Evaluation of the workshop entries according to the criteria for each of the mini-events and (2) discussion of the design of future LaMSA systems. First, by this point in the day, the systems showcased during the mini-events will have been evaluated and scored according to the scoring guidelines above. The organizers will lead the participants in a discussion of what worked well, what didn’t, and what was learned from each of the mini-events. We will also draw comparisons between these systems and biological LaMSA systems that serve as inspiration. In addition, we will discuss fundamental differences between biological and synthetic LaMSA systems, and how we can devise more universal metrics that quantify performance in both realms. Second, we will discuss how to evolve the designs of future LaMSA robots in the face of practical constraints on the constituent components. In order to evaluate engineered LaMSA systems, we need to standardize on measurements of LaMSA components including the motor, spring, and latch. However, for many of the systems demonstrated throughout the workshop, this is not possible. For example, some designs require external energy (e.g., manual human intervention) to reset, load, and/or trigger their systems. Before we can compare these systems to their biological counterparts, the amount of energy loaded into the system must be considered. Our objective of this exercise is to make participants understand the levels of tuning between LaMSA components in fully contained and repeatable biological systems.
Demonstration Details
The proposed workshop will consist of a set of mini-events around different LaMSA behaviors (jumping, throwing, striking) that will include short talks, demonstrations, and evaluations. The workshop will conclude with a group discussion to synergize the lessons learned and opportunities in both biological study and synthetic LaMSA robot design. This concluding portion will take the form of a structured design event where participants are provided with hypothetical constraints for motors, springs, and latches and asked to produce guidelines for how to create effective LaMSA mechanisms and to adapt their current designs towards higher performance.
- Integrate LaMSA principles into demonstrative systems that exhibit unprecedented capabilities for a variety of behaviors such as jumping, archery, striking, shot put, etc.
- Disseminate the LaMSA principles accumulated by the robotics community so that researchers from different disciplines can build on our framework.
- Showcase our findings in the field of LaMSA and amass experimental data to motivate the study of impulsive systems more broadly.
- Demonstrate novel control strategies for aperiodic, hybrid dynamic systems.
-
Lightning talks: We require each entry to be accompanied with a short five minute talk describing the following:
- Design history and challenges
- Relevant performance metrics and data(if any)
- Specific information on LaMSA components such as the projectile or moving body mass and material properties of the spring
- What past work, from the robotics community or outside (biological or otherwise), has inspired or influenced your designs?
-
Event-specific demonstrations:
- Weight categories: < 10g, 10-50g, 50-100g and 100-200g.
- 200 gram mass upper limit.
- Energy density limits: for safety, chemical explosive driven movements are not allowed. The actuation of the impulsive event must be from an elastic material.
-
High jump - maximum height
- Jumper will jump to its maximum height. Vertical jump performance will be evaluated based on the metrics outlined in the scoring document.
-
High jump - jump accuracy
- Jumper will jump as close as possible to the target height (e.g., 1m) and land as close as possible to the takeoff site. Target height will be provided before the event. Evaluation of the jump performance will be based on the metrics outlined in the scoring document.
-
Long jump - maximum distance
- Jumper will jump to its maximum distance. Jump performance will be evaluated based on the metrics outlined in the scoring document.
-
Long jump - jump accuracy
- Jumper will jump as close as possible to the target distance (e.g., 1m). Target distance will be provided before the event. Evaluation of jump performance will be based on the metrics outlined in the scoring document.
- For <10g systems: 2.5mm diameter steel ball (0.5g)
- For 10-50g systems: 4.36mm diameter steel ball (2.5g)
- For 50-100g systems: 5.5mm diameter steel ball (5g)
- For >100g systems: 7mm diameter steel ball (10g)
- High speed camera, HD camera, and camera lighting
- Load cell and data acquisition system
- Targets for archery, steel ball bearings for shotput
- Measurement tools
Expected Outcomes
Workshop Guidelines
Each workshop participant will submit at least one entry. Each entry will have two components, a lightning talk and a demonstration.
Event-Specific Metrics
A single entry will only compete in one of the sub-categories below (e.g., only long jump - accuracy or long jump - maximum distance). However, you can create multiple entries for the same robot to compete in multiple separate events. Each event will be scored and evaluated relative to other entries in that same sub-category subject to the metrics defined below. For more details on evaluation criteria and scoring guidelines. Please refer to the scoring guidelines document.
Jumping
Shotput
Device will throw the projectile (spherical steel ball bearings) as far as possible. Device performance will be evaluated based on the metrics outlined in the scoring document. Participants will be supplied with spherical steel ball bearings according to the weight class of the device. The following are the specifications of the spherical steel ball bearings that shall be provided:
Archery
Device will shoot a projectile with the goal of hitting a small target (10cm diameter circle) at a fixed known distance (1-5m) at a height of 1m. The target distance will be provided during the event and participants can make changes to the device (swap out springs, etc.) to aim towards the target. Each participant will have three trials and scoring will be evaluated based on the metrics listed in the scoring document. Participants may create/provide their own projectile. However, participants are responsible for safety considerations for the projectiles they use.
Striking
Device will strike a load cell. Dimensions of the platform on which the device shall be mounted onto the strike at the load cell shall be provided well before the mount. Performance of the device shall be evaluated based on the guidelines outlined in the scoring document.
Scoring metrics and guidelines
Please refer to the document below. The document also outlines the scoring process through example devices.
Logistics
The organizers will provide the following:
Safety Considerations
Participants must observe all markings and areas associated with the demonstrations. The organizers shall provide enclosures for the shot put and archery demonstrations. Participants must also limit the speed and force at which the projectiles are thrown as directed by the conference organizers (shot put distances will be calculated by the launch velocity and angle and not the actual distance). Similarly, for jumping events the organizers will provide netting to protect other participants and facilities. I understand that my participation in these activities is voluntary and assume all risks associated with my participation. I agree that IEEE, the event organizers, host facility, or any conference vendors shall not be liable, under any theory, for any harm that may come to me, my robot, or supporting equipment during the course of this workshop and forever release IEEE and all parties associated with the conference from any claims. In the event my I, or my robot, causes any damage to the event location, I agree to reimburse IEEE for any damage and indemnify IEEE for any losses. Please contact the organizers prior to the workshop if you have any questions. Participants are required to wear necessary protective gear as directed by the organizers and adhere to the organizers' safety guidelines to ensure the safety of everyone attending the demonstration events.
Organizers
- Prof. Robert Wood, School of Engineering and Applied Sciences, Harvard University
- Prof. Sarah Bergbreiter, Department of Mechanical Engineering, Carnegie Mellon University
- Prof. Sheila Patek, Department of Biology, Duke University
Registration
To register, please follow the steps listed below:
- The registration information for the conference and workshops can be found here. To begin registration, click 'register now' in the section 'Registration for Authors'.
- If you are interested in attending only the workshop, then you can choose the option 'Workshop/Tutorials Only Registration' during the resigration process.
- Once the registration is completed, please fill this form to submit your device entry.
The above device entry form is to solicit information about your device and the corresponding demonstration event that you'd like to participate in. Please fill out a separate entry for each robot/device. Please fill out a separate entry for each event that you'd like to enter the robot/device for.
Contact
For more information, please contact Prof. Robert Wood (rjwood@seas.harvard.edu)